THE TECH DIARY:
How to Determine an Electric Race Karts Power Output
Technology Team
Total Karting Motorsport
In December, we wrote about how the e-kart works including briefly its battery and some of the challenges we face with it. This month we’ll take this further, answering questions such as:
How do we get the most out of the electric race karts powertrains?
What problems have we encountered with balancing performance and capacity?
Why do we not set the powertrain to its maximum power?
Can the electric race karts go faster?
We start with a simple calculation: The electric power (P) is calculated by the product of voltage (V) and current (I). P=V I.
THE BMS (BATTERY MANAGEMENT SYSTEM)
Each battery has a current limit. This limit is both on the BMS and on the cells themselves. If the current exceeds the battery capability, the BMS cuts the current and we have a ‘cut out’ – this is in place to protect the battery cells from damage.
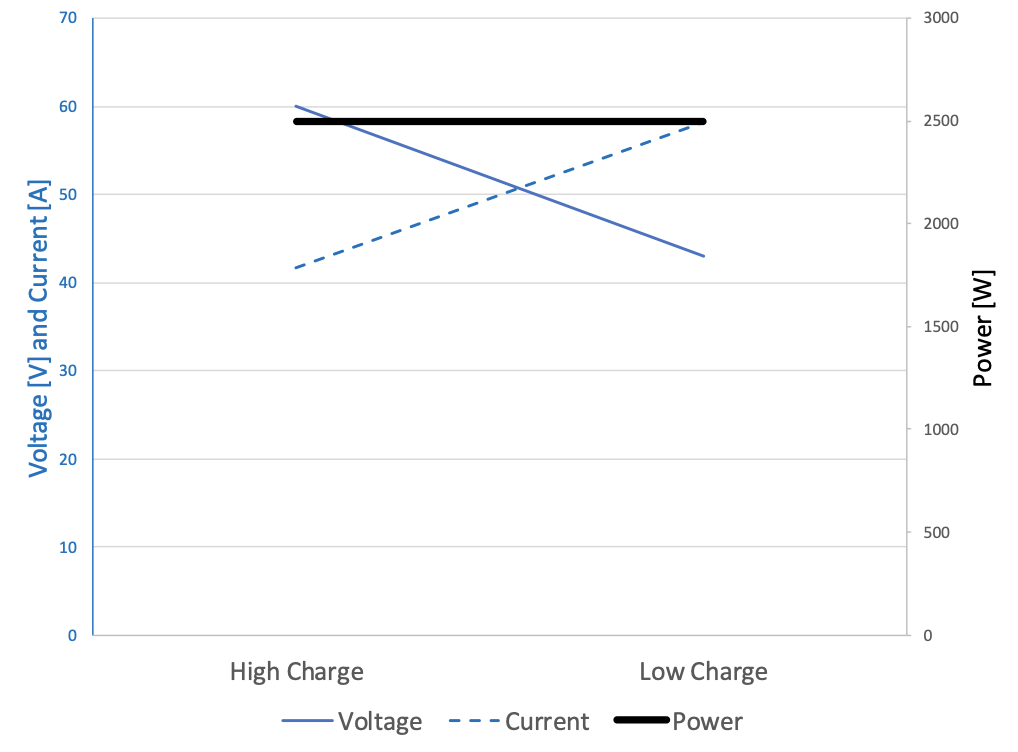
While the battery uses its energy, the voltage drops. To maintain the same power, but with lower voltage, the control unit requires more current from the battery. This means that the maximum limit for power is given by the current that is needed when the battery is almost empty.
To be clear, the power output from the battery is the same at low and high levels of charge, because the control unit adapts the current request to the battery charge level in order to consistently output the same power irrespective of charge.
This means the e-kart keeps going at the same power, speed and performance until it completely runs out of charge – this is illustrated in the following plot where you can see in black the power that remains constant with the voltage dropping and the current, that is requested by the control unit, that increases.
HOW DO WE FIND THE MAXIMUM?
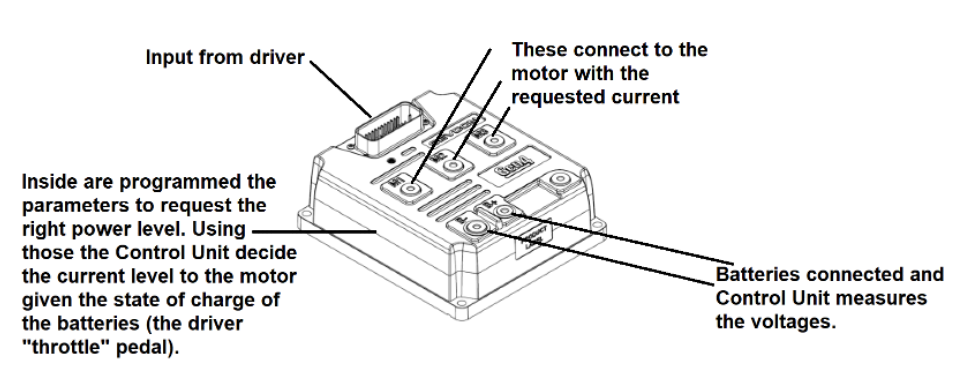
The way we set the maximum limit for power is by programming in the control unit what we call a Torque Map – this is a map that instructs the control unit on the torque level needed for each motor speed. This is then scaled from 0 to 1 depending on the driver’s request from the throttle pedal. (The torque is the way the control unit determines the power level that the kart needs to go at for a certain motor speed and the kart acceleration.)
SO, CAN THE E-KARTS GO FASTER?
Yes, we could potentially ask for more power at high levels of charge, but that would result to cut outs at low levels of charge because the current would not be sustainable at the lower level of charge. It is a fine balance between giving drivers the most power we can but making sure the current stays under the limit at all levels of charge for sustained power.
We also need to consider that this is a full control system and there are cases in which there are quick oscillations of current in order to maintain the correct power output.
These oscillations are too quick to have an impact on the power of the kart, but they could be enough to trigger a cut out to preserve cells from damage. This means that we need to have a certain margin for the maximum current, in order to allow for these oscillations to happen without triggering a cut out
It would be easy to set it with a lot of margin, but as Rob mentioned in his introduction to reliability, this would go against our target to provide a competitive electric race kart as the power levels would be too low at that point. This is why we need to set the margin in a way that it cannot cause damage to the cells but at the same time are as close as possible to the limit in order to provide the maximum performance possible. This fine balance has received a lot of testing and development over time.
In an upcoming update, we’ll discuss how this impacts charging requirements and time.
The biggest challenge we have faced as a group of engineers lies in understanding and perfecting the Control System. This is effectively the brain of the kart and dictates how each of the principal drivetrain components communicate with each other, across the almost infinite number of possible input scenarios.
Stay in the loop
Want to be informed when the next Tech Diary post is out? Subscribe below:
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.